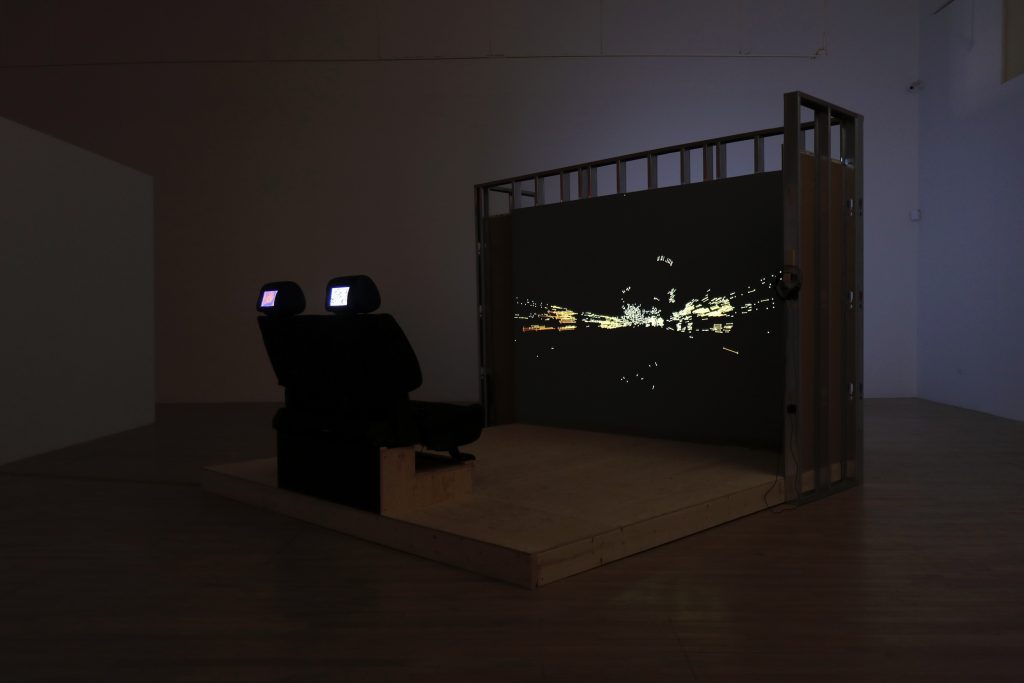
The Manœuvres video series is part of a body of works that I’ve been developing since 2016 based on observing the R&D of driverless cars and dash cam compilations. On one hand, several technical, economical, moral and ethical issues are raised by vehicles that maneuver without human intervention. On the other, dash cam videos display accidents or spectacular events that portray roads as places where the unexpected occurs. The works play with the tension that arises when confronting the programmed behaviors of mobile robotics with the unpredictable nature of the world.
Peripheral Vision, from the Manœuvres video series (2017-2018).
Perception is blurred as the camera and its microphone are gradually obstructed by snow.
The Iterative Roundabout, from the Manœuvres video series (2017-2018).
A deep neural network is training to decode its surroundings while driving around. During this repetitive learning process the environment slowly reveals itself as the computer vision system tries to identify correctly the road covered with snow.
Bug Tracker, from the Manœuvres video series (2017-2018).
An object detection algorithm identifies and tracks insects while the vehicle is immobilized.
Lost in the Forest, from the Manœuvres video series (2017-2018).
In this video, The video revisits a 4 and a half hours journey in maze of muddy forest roads.
The Crossing, from the Manœuvres video series (2017-2018).
Registration points and displacement vectors calculate the future position of objects while a vehicle crosses a bridge.
Flow, from the Manœuvres video series (2017-2018).
An optical flow overlay gives the impression that the car is contemplating the waves breaking on the shore.



Thanks to the Conseil des arts et des lettres du Québec, Canada Council for the Arts and Télé-Québec for their support. Thanks to Nancy Lombart, Etienne Richan, André Girard, Jean-Philippe Dionne, Eric Mattson, Au-delà des images opératoires group and La Chambre blanche for their involvement. The Iterative Roundabout uses a modified version of SegNet.